系我們")
 ??
??IPM自舉電路設計與快恢復二極管選型
作者:海飛樂技術(shù) 時間:2018-05-23 17:00
實現(xiàn)自舉有兩個關(guān)鍵問題:一是自舉電容的初始充電;二是自舉電容充完電后,當下臂關(guān)斷后上臂并未立即導通,而在從下臂關(guān)斷到上臂導通期間,電容會放電,因此必須保證少量放電后電容電壓仍有驅(qū)動能力。如果以上兩個問題未能處理好,將導致即使PWM波形正常,IPM也不能工作,因為自舉電壓不足以驅(qū)動上臂導通。
本文介紹了IPM自舉電路的基本拓撲結(jié)構(gòu)和原理,并重點研究了自舉電容初始充電問題,通過在控制程序中執(zhí)行簡單的初始充電語句,很好地解決了上述關(guān)鍵問題,并在項目中取得良好的充電效果。
1 IPM模塊自舉電路基本拓撲結(jié)構(gòu)和原理
電壓自舉,就是利用電路自身產(chǎn)生比輸入電壓更高的電壓。
基于電容儲能的電壓自舉電路通常是利用電容對電荷的存儲作用來實現(xiàn)電荷的轉(zhuǎn)移,從而實現(xiàn)電壓的提升。電壓自舉電路利用電荷轉(zhuǎn)移的方式進行工作,通過存儲電容,把電荷從輸入轉(zhuǎn)移到輸出,提供負載所需要的電流。圖1給出了雙倍壓電壓自舉電路的基本原理。
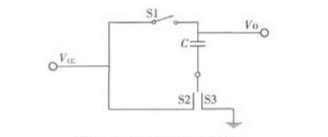
圖1 IPM模塊自舉電路
假設所有開關(guān)均為理想開關(guān),電容為理想電容。當開關(guān)S1和S3閉合時,電源VCC給電容C充電使其電壓達到VCC。然后開關(guān)S1和S3斷開,S2閉合,直接接到電容C的低壓端,此時電容C上仍然保持有前一個相位存儲的電荷VCC×C。由于在S2閉合時,電容C上的電荷量不能突變,因此有:(V0-VCC)×C=VCC×C,即V0=2VCC。
在沒有直流負載的情況下,通過圖1所示的電路,在理想情況下,輸出可達到輸入電壓的兩倍。
2 自舉電路設計中的關(guān)鍵問題研究
本項目的IPM型號選用IGCM20F60GA[2]。圖2是IPM自舉電路原理圖。由圖2可知,自舉元件一端接電路的輸入部分,另一端接到同相位的輸出電路部分,借輸入、輸出的同相變化,把自己抬舉起來,即自舉元件引入的是正極性的反饋。
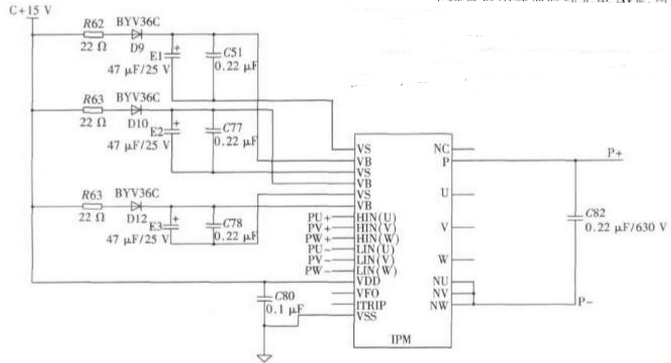
圖2 IPM自舉電路原理圖
對原理圖中第一路自舉電路進行分析[3-4]。IPM模塊自舉電路僅由自舉電阻R62、自舉二極管D9和自舉電容E1組成,因此簡單可靠。其電路基本工作過程為:當VS因為下橋臂功率器件導通被拉低到接近地電位GND時,控制電源VCC會通過R62和D9給自舉電容E1充電。當上橋臂導通,VS上升到直流母線電壓后,自舉二極管D9反向截止,從而將直流母線電壓與VCC隔離,以防止直流母線側(cè)的高壓串到控制電源低壓側(cè)而燒壞元器件。此時E1放電,給上橋臂功率器件的門極提供驅(qū)動電壓。當VS再次被拉低時,E1將再次通過VCC充電以補充上橋臂導通期間E1上損失的電壓。這種自舉供電方式就是利用VS端的電平在高低電平之間不停地擺動來實現(xiàn)的。如圖2所示,自舉電路給E1充電,E1的電壓基于上橋臂輸出晶體管源極電壓上下浮動。
由于運行過程中反復地對自舉電容進行充放電,因此必須選擇適當?shù)膮?shù),保證自舉電容上的電壓在電機運行時保持高于欠壓鎖定電平。
由上述分析可知,要保證E1的跌落電壓能夠得到及時、完全的補充,自舉電路對下橋臂最小導通時間有一定的要求。但是若能正確選擇各元器件參數(shù),自舉電路對下橋臂最小導通時間的限制將會大大降低。
2.1 自舉電容E1的選擇
自舉電容E1需要根據(jù)自舉電容所能得到的最低充電電壓來選擇。實際應用中可以應用以下簡化公式來初步計算E1:
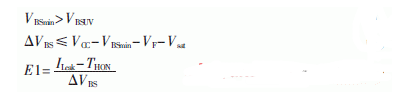
式中,ΔVBS為自舉電路在上橋臂功率器件導通時所允許的最大電壓降,VF為自舉二極管正向壓降,VBSmin為所要求的最低上橋臂驅(qū)動電壓,VBSUV為上橋臂控制電壓的欠壓保護值,Vsat為下橋臂功率器件的飽和壓降,THON為上橋臂的最大導通時間,ILeak為IPM模塊規(guī)格書中所提供的上橋臂功率器件驅(qū)動所需的最大額定電流值。這樣只要選定ΔVBS即可快速計算出E1。但是考慮到各元器件參數(shù)的分布性和應用電路的可靠性,實際使用的E1應當選擇為計算值的2~3倍。本項目選擇的是47 μF/25 V的電解電容。
2.2 自舉電阻R62的選擇
自舉電阻R62的作用是限制dVBS/dt。為了保證自舉電容能夠在下橋臂最小導通時間充電ΔVBS,所以:
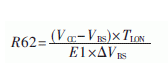
式中,TLON為下橋臂的最小導通時間。本項目中自舉電阻R62取22 Ω。
2.3 自舉二極管D9的選擇
因為自舉二極管起到隔離直流母線高壓和控制電源低壓的作用,必須阻斷直流干線上的高壓,才能保護IC器件不受損壞, 所以選擇D9時應當重點考慮二極管耐壓、反向截止時間和正向?qū)妷航祹讉€參數(shù)。二極管承受的電流是柵極電荷與開關(guān)頻率之積。為了減少電荷損失,應選擇耐高壓的反向漏電流小的超快恢復二極管。本項目選用的自舉二極管型號為BYV36C。
IPM自舉電路設計與快恢復二極管選型
IPM自舉電路設計與快恢復二極管選型
3 自舉電容初始充電過程及控制方法
3.1 初始充電分析及實現(xiàn)程序
在自舉電容的初始充電過程中,較大的初始充電電流有可能給系統(tǒng)可靠性帶來不利影響。這是因為較大的電流沖擊一方面對控制電源器件造成沖擊,另一方面增大了初始充電階段上下橋臂直通的風險。由此可見應當盡量避免下橋臂長時間開通的自舉電容初始充電方法。
實際應用中可采用脈沖串的方法,分多次給自舉電容充電,直到自舉電容充滿。這樣可有效減小初始充電過程中的充電電流。
本項目采用瑞薩SH7125作為控制芯片,軟件上采用了一種簡單實用的方法實現(xiàn)了自舉電容的初始充電。具體的做法是:在每次更新PWM占空比時,先判斷占空比的值,若小于0.056,則認為電機的給定速度為零,并以此作為進入充電程序的判斷條件。如下面的程序所示:
由上述程序可知,通過程序預定的方式給定直流無刷電機的換相順序,使得 U、V、W 三相進行錯位充電,即每一次只給某一相的自舉電容充電并依次循環(huán)直到三相都充滿。
該控制程序的優(yōu)點在于上臂被禁止輸出,所以不存在上下臂直通的危險,且只要占空比小于0.056時就對自舉電容充電,能保證自舉電容能充滿。通過將初始充電控制語句放在PWM更新函數(shù)里,保證了初始充電的實時性,很好地解決了實現(xiàn)自舉的關(guān)鍵問題。
3.2 自舉電壓波形及分析
圖3是實測的自舉電壓波形。由圖3分析可知,初始充電近似階躍函數(shù)。在0.1 s時,就能充電到14 V,即上述初始充電程序能快速完成初始充電;在0.2 s時,電機開始運行,自舉電容放電。由圖3還可知,在運行階段,自舉電容電壓基本穩(wěn)定在14 V,幾乎在電機停止的瞬間,自舉電容電壓迅速充電到15 V,然后開始慢慢放電。
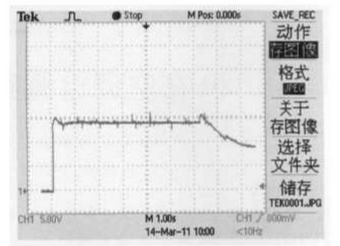
圖3 ipm自舉電路波形
由上述分析可知,本項目采用的自舉電容初始充電的方法簡單實用,在實際項目應用中取得良好的效果。
本文分析了自舉電路的基本原理,保證了充電的實時性,在應用中取得了良好的IPM驅(qū)動效果,為自舉電容的初始充電提供了一個簡單實用可靠的方案??傊诶碚撝笇У幕A上,使得控制算法和硬件參數(shù)緊密相關(guān),并在實際系統(tǒng)反復調(diào)試并最終確定參數(shù),以便最大程度地保證電路的可靠性。
上一篇:同步整流的工作原理及結(jié)構(gòu)分析
下一篇:開關(guān)電源電路中常用的肖特基與快恢復二極管